Computer Notes, Programming codes, Hardware and Networking Tip, Entertainment, Biography, Internet Tip, Tech News, Latest Technology, YouTube,
Computer Fundamental
Hardware & Networking
Applications
Programming
Random Post
[random][newsticker]
2019
About RAM
Advantages of multiprocessing system
Associative memory
Binary Number System
CA
CA Notes
Change drive icon
change pendrive icon
Computer Abbreviation
Computer Architecture
Computer fundamental MCQ
Computer Generation
Computer generation computer notes
Computer MCQ
Computer Network MCQ
Computer Operator MCQ
Critical Section
Critical section in OS
Database connectivity in java
Deadlock avoidance
Deadlock detection algorithm
Deadlock Detection and Recovery
Deadlock detection method
Deadlock Handling
Deadlock in OS
Deadlock Prevention
Deadlock Recovery
define object and class
Define system cell
Descrete Structure
Device Driver
Device driver in computer
device driver in os
DFA
DFA contains with
DFA ends with
dfa examples
dijkstra's algorithm
Discrete Structure
Discrete Structure graph theory
Download JDBC Driver
Download MySql
Download PUBG
DS
DS Notes
FCFS Job Scheduling Algorithm
Finding shortest path
Finite Sate Automata
Flynn's Classifications
fragmentation in computer
fragmentation in harddisk
fragmentation in os
fragmented memory
Full form related to computer
Generations of operations
Generations of OS
Graph theory
ICT 1st semester notes
Instruction Address Modes
Java
java array declaration
java class and object example
Java Database connectivity example
java event handling example program
Java JDBC
Java JMenuBar
Java JSP program example
java notes
java program methods example
Java program to create class and object
java program to create methods
java program to print even number between any two numbers
Java programming
java programming notes
Java programs
Java question answer
java swing example
java swing program to calculate simple interest
Java Tutorials
JSP program
learn qbasic
Lekh
MCQ
MCQ Computer
MCQ Operating System
memory fragmentation
MICT 1st semester notes
mict 1st semester operating system notes
MICT first semester notes
Multiprocessing
mutex in os
Necessary conditions for deadlock
Number System
Operating System
Operating system notes
OS
OS Notes
OS Numeric
pattern printing program in qbasic
patterns in qbasic
Pipeline Hazards
Pipelining
Pipelining concept
prime or composite in qbasic
print patterns qbasic
print series in qbasic
Printing Series in qbasic
PUBG
PUBG Mobile
PUBG PC
PUBG Story
qbasic
qbasic code
qbasic for class 10
qbasic for class 8
qbasic for class 9
qbasic for school
QBASIC Pattern printing
qbasic pattern printing program
qbasic pattern printing programs
qbasic pattern types
qbasic patterns
qbasic programming tutorials
qbasic programs
qbasic sequence printing programs
qbasic tutorials
Race Condition in Operating system
reverse order in qbasic
RISC and CISC
RISC Pipeline
Scheduling algorithm
segmentation in operating system
segmentation in os
semaphore and mutex
Semaphore concept in os
Semaphore in os
semaphore in os notes
semaphore meaning
sequential programs in qbasic
series in qbasic
series printing programs in qbasic
shell in operating system
shell in os
shortest path
shortest path algorithm
simple interest program in java swing
System Bus
System Cell
Teach Blog
Tech Blog
Tech School
technical school
The Shell in Operating system
types of fragmentation
Types of Multiprocessor
types of operating system
Types of pipeline hazards
View Connected Wifi password
Virtual Memory
Virtual memory in OS
Von Neumann's architecture
What is associative memory?
what is class?
What is computer system?
What is Fragmentation?
What is jsp?
what is object?
What is process?
What is segmentation
What is System Cell
What is Thread?
what is virtual memory in computer
What is virtual memory?
पब्जी गेम
QBASIC Pattern Printing Program (NEPAL, PAL, L)
Rajkumar Lama
November 26, 2019
pattern printing program in qbasic
,
qbasic
,
QBASIC Pattern printing
,
qbasic pattern printing program

Simple Program
CLS s$ = "NEPAL" r = 1 t = 10 FOR i = 5 TO 1 STEP -2 PRINT TAB(t); MID$(s$, r, i) r = r + 2 t = t + 2 NEXT i END
by using SUB END SUB
DECLARE SUB pat(a$) CLS a$ = "NEPAL" CALL pat(a$) END SUB pat (s$) r = 1 t = 10 FOR i = 5 TO 1 STEP -2 PRINT TAB(t); MID$(s$, r, i) r = r + 2 t = t + 2 NEXT i END SUB
by Using FUNCTION END FUNCTION
DECLARE FUNCTION pat$(a$) CLS a$ = "NEPAL" p$ = pat$(a$) END pat$ (s$) a$ = "NEPAL" r = 1 t = 10 FOR i = 5 TO 1 STEP -2 PRINT TAB(t); MID$(s$, r, i) r = r + 2 t = t + 2 NEXT i END FUNCTION
QBASIC (Pattern Printing) 1, AA, 222, bbbb, 33333, cccccc
Pattern Type
1
AA
222
bbbb
33333
cccccc

Method 1: Using SUB END SUB
Method 1: Using FUNCTION END FUNCTION
1
AA
222
bbbb
33333
cccccc

CLS
s$ = "1A2b3c"
FOR i = 1 TO LEN(s$)
FOR j = 1 TO i
PRINT MID$(s$, i, 1);
NEXT j
PRINT
NEXT i
END
Method 1: Using SUB END SUB
DECLARE SUB pattern(s$)
CLS
s$ = "1A2b3c"
CALL pattern(s$)
END
SUB pattern (s$)
FOR i = 1 TO LEN(s$)
FOR j = 1 TO i
PRINT MID$(s$, i, 1);
NEXT j
PRINT
NEXT i
END SUB
Method 1: Using FUNCTION END FUNCTION
DECLARE FUNCTION pattern$(s$)
CLS
r$ = pattern$(s$)
END
FUNCTION pattern$ (s$)
s$ = "1A2b3c"
FOR i = 1 TO LEN(s$)
FOR j = 1 TO i
PRINT MID$(s$, i, 1);
NEXT j
PRINT
NEXT i
END FUNCTION
Click Here For More Patterns SET-1 in QBASIC Program
Write a Java program to create Rectangle class with data member length and breadth. Include methods getData() and displayArea() in the class. Finally create an object of Rectangle class and display its area.
Rajkumar Lama
September 02, 2019
Java
,
java program methods example
,
java program to create methods
,
Java programming

import java.util.Scanner; class Rectangle4{ int l, b; void getData(){ Scanner in = new Scanner(System.in); System.out.print("Enter length : "); l=in.nextInt(); System.out.print("Enter breadth : "); b=in.nextInt(); } void displayArea(){ int a; a = l*b; System.out.println("Area = "+a); } public static void main(String args[]){ Rectangle4 obj = new Rectangle4(); obj.getData(); obj.displayArea(); } }
Define the term class and object? How can you create class and object in Java? Explain with example.
Rajkumar Lama
September 02, 2019
define object and class
,
Java
,
java class and object example
,
Java program to create class and object
,
what is class?
,
what is object?
Class is a blueprint to template of real world objects that specifies what data and what methods will be included in object of the class. Class is also called description group of object objects having similar properties. A class is also called user defined data type or programmers defined data type because we can define new data types according to our need by using classes.

Objects are instances of class. We can say that object is variable of class type. Memory for instance declaration rather at the time of class declaration rather than time of object creation. Thus we can say that objects have physical existence and classes are only concepts.
Declaring Classes
Syntax:
[Access Modifier] className{
// body
}
Creating Object
Syntax:
[className] [objectName] = new [className]();
Program
Objects are instances of class. We can say that object is variable of class type. Memory for instance declaration rather at the time of class declaration rather than time of object creation. Thus we can say that objects have physical existence and classes are only concepts.
Syntax:
[Access Modifier] className{
// body
}
Creating Object
Syntax:
[className] [objectName] = new [className]();
Program
class Demo{ void display(){ System.out.println("Class Example"); } public static void main(String args[]){ Demo obj = new Demo(); obj.display(); } }
What do you mean by JSP? Write a program in the JSP to display Message "I Love Programming" 100 times.
Rajkumar Lama
September 02, 2019
Java
,
Java JSP program example
,
Java programming
,
JSP program
,
What is jsp?
JSP is a Java Server side technology that does all the processing at server. It is used for creating dynamic web application using Java as programming language.
JSP Program to print "I Love Programming" 100 times.
Program
JSP Program to print "I Love Programming" 100 times.Program
<!DOCTYPE html> <html> <head> <meta http-equiv="Content-Type" content="text/html" charset=UTF-8"> <title> A simple JSP program </title> </head> <body> <h1> Displaying "I love Programming 100 times !!" </h1> <table> <% for(int i=1; i<=100; i++){ %> <tr> <td> I Love Programming </td> </tr> <% } %> </table> </body> </html>
Write a program using swing components to find simple interest. Use text fields for input and output. Your program should display the result when the user presses a button.
Rajkumar Lama
August 31, 2019
Java
,
java event handling example program
,
java swing example
,
java swing program to calculate simple interest
,
simple interest program in java swing
 |
| Output of the given Java program |
Program
import javax.swing.*;
import java.awt.*;
import java.awt.event.*;
class PTR extends JFrame implements ActionListener //implement listener interface
{
JTextField t1, t2, t3, t4;
JLabel l1,l2,l3, l4;
JButton b1;
public PTR()
{
super("Handling Action Event");
setDefaultCloseOperation(JFrame.EXIT_ON_CLOSE);
l1 = new JLabel("Enter P :");
l2 = new JLabel("Enter T :");
l3 = new JLabel("Enter R : ");
l4 = new JLabel("Interest : ");
t1 = new JTextField(10);
t2 = new JTextField(10);
t3 = new JTextField(10);
t4 = new JTextField(10);
b1 = new JButton("Calculate");
setLayout(new FlowLayout(FlowLayout.LEFT,150,10));
add(l1);
add(t1);
add(l2);
add(t2);
add(l3);
add(t3);
add(l4);
add(t4);
add(b1);
b1.addActionListener(this);//Registering event
setSize(400,300);
setVisible(true);
}
public void actionPerformed(ActionEvent ae) //Handle Event
{
int p, t, r, si;
p = Integer.parseInt(t1.getText());
t = Integer.parseInt(t2.getText());
r = Integer.parseInt(t3.getText());
if(ae.getSource() == b1)
si = (p*t*r)/100;
else
si = 0;
t4.setText(String.valueOf(si));
}
public static void main(String a [])
{
new PTR();
}
}
How array can be declared in Java? Write a complete Java program to read two numbers from the user (where first number is less then second number) then find only even number between them.
Rajkumar Lama
August 31, 2019
Java
,
java array declaration
,
java program to print even number between any two numbers
,
Java question answer
Array is a data structure which contains of similar data type. We store only fixed set of elements in a java array. Array is used to store a collection of data, but it is often more useful to think of an array as a collection of variable of the same type.

To declare an array in a Java program, we must declare a variable to reference the array and we most specify the type of array the variable can reference.
Syntax:
dataType[] arrayRefVar;
or
dataType arrayRefVar[];
Program

To declare an array in a Java program, we must declare a variable to reference the array and we most specify the type of array the variable can reference.
Syntax:
dataType[] arrayRefVar;
or
dataType arrayRefVar[];
import java.util.Scanner; class EvenArray{ public static void main(String args[]){ Scanner in = new Scanner(System.in); int x, y; System.out.print("Enter First Number : "); x = in.nextInt(); System.out.print("Enter Second Number : "); y = in.nextInt(); for(int i=x; i<=y; i++){ if(i%2==0){ System.out.println(i); } } } }
What is thread in Java? Difference between process and thread? Life cycle of thread.
The thread is a lightweight process that means one single program can be divided into small threads which will execute concurrently for fast execution of task. We can say that thread is a sub process of a process.
A thread is an independent path of execution within a program. Many thread can run concurrently within a program. Every threads in Java is created and controlled by the java.lang thread class. A java program can have many threads, and these threads can run currently, either synchronously or asynchronously.
- Threads are lightweight compared to process.
Difference between thread and process
| Process | Thread |
|---|---|
| - A Process is an instance of a program. It contains a threads. | - Threads are the parts of process. It cannot contain a process. |
| - Process run in its separate. | - Thread run in shared memory spaces. |
| - Process is controlled by the operating system. | - Threads a re controlled by programmer in a program. |
| - Processes are independent. | - Threads are dependent. |
| - New processes require duplication of the parent process. | - New threads are easily created. |
| - Process require more time for context switching as they are more heavy. | - Threads require less time for context switching as they are lighter then process. |
| - Process require more resources then threads. | - Threads generally need less resources than process. |
| - Process require more time for termination. | - Threads require less time for termination. |
Life cycle of threads
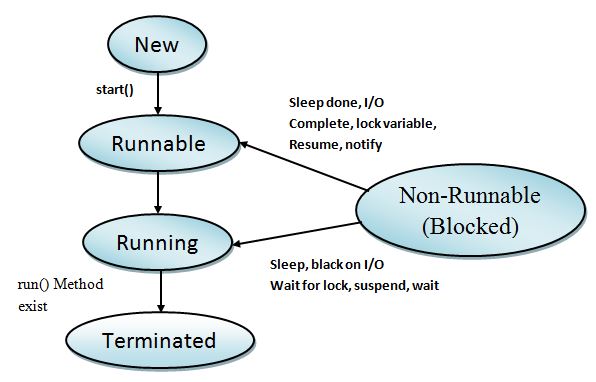
New
The thread is in new state if you create an instance of thread class but before the invocation of start() method.
Runnable
A thread in the runnable state is executing the Java virtual machine but it may be waiting for other resources from the operating system such as processor.
Running
The thread is in running state if the thread scheduler has selected it.
Blocked (Non Runnable)
It is the state when the thread is still alive, but is currently not eligible to run.
Terminated
A thread is in terminated or dead state when its run() method exists.
Java Database Connectivity Simple Example ( Download JDBC Driver and MySql)
Rajkumar Lama
August 29, 2019
Database connectivity in java
,
Download JDBC Driver
,
Download MySql
,
Java
,
Java Database connectivity example
,
Java JDBC
 Write a Java program to create a form with student id, student name, level, and two button insert and clear. Handle the event such that buttons with perform the operations as implied by their name.
Write a Java program to create a form with student id, student name, level, and two button insert and clear. Handle the event such that buttons with perform the operations as implied by their name.
import javax.swing.*;
import java.awt.*;
import java.awt.event.*;
import java.sql.*;
class Student extends JFrame implements ActionListener
{
JLabel sid,sname,slevel;
JTextField tid,tname, tlevel;
JButton insert, clear;
JPanel p1,p2,p3,p4;
Student()
{
setSize(400,250);
setTitle("Students Data Entry");
setDefaultCloseOperation(JFrame.EXIT_ON_CLOSE);
p1=new JPanel();
p2=new JPanel();
p3=new JPanel();
p4=new JPanel();
setLayout(new BorderLayout());
add(p1,BorderLayout.CENTER);
add(p2,BorderLayout.SOUTH);
p1.setLayout(new GridLayout(1,2));
p1.add(p3);
p1.add(p4);
p3.setLayout(new FlowLayout(FlowLayout.LEFT, 75,20));
p4.setLayout(new FlowLayout(FlowLayout.LEFT, 25,20));
sid=new JLabel("Student ID");
sname=new JLabel("Student Name");
slevel=new JLabel("Level");
p3.add(sid);
p3.add(sname);
p3.add(slevel);
tid=new JTextField(10);
tname=new JTextField(10);
tlevel=new JTextField(10);
p4.add(tid);
p4.add(tname);
p4.add(tlevel);
p2.setLayout(new FlowLayout(FlowLayout.CENTER, 20,20));
insert=new JButton("Insert");
clear=new JButton("Clear");
p2.add(insert);
p2.add(clear);
insert.addActionListener(this);
clear.addActionListener(this);
setVisible(true);
}
public void actionPerformed(ActionEvent ae)
{
Connection c=null;
Statement s=null;
try
{
Class.forName("com.mysql.jdbc.Driver");
c = DriverManager.getConnection("jdbc:mysql://localhost/mydb","root", "raj");
s=c.createStatement();
if(ae.getSource()==insert)
{
int id;
String name, level;
id=Integer.parseInt(tid.getText());
name=tname.getText();
level=tlevel.getText();
String query="insert into studentdb values("+id+",'"+name+"',"+level+")";
s.executeUpdate(query);
JOptionPane.showMessageDialog(this,"Data is Recorded!!!!");
}
if(ae.getSource()==clear)
{
tid.setText("");
tname.setText("");
tlevel.setText("");
}
}
catch(Exception e)
{
System.out.println(e);
}
}
public static void main(String a[])
{
new Student();
}
}
Multiprocessor, It's Types and Flynn's Classification (Computer Architecture)
Rajkumar Lama
August 22, 2019
Advantages of multiprocessing system
,
CA
,
Computer Architecture
,
Flynn's Classifications
,
Multiprocessing
,
Types of Multiprocessor
Multiprocessing is the use of two or more central processing unit within a single computer system. The term also refers to the ability of a system to support more than one processor or the ability to allocate task between them. Multiprocessor is a computer system having two or more processing units each sharing main memory and peripherals, in order to simultaneously process programs.
Multiprocessing however means using more than one processor. However, multiprocessor or parallel system are increasing in importance nowadays. These systems have multiple processors working the parallel that share the computer clock, memory bus, peripheral devices etc. The following figure demonstrate the multiprocessor architecture as

1. Symmetric Multiprocessor
In this type of multiprocessor each runs an identical copy of the OS and these copies communicate with one another as needed. All Processor are peers. Examples are Windows NT, Sun Solaries, Digital Unix, OS/2 and Linux.
2. Asymmetric multiprocessor
In this multiprocessor each processor is assigned a specific task. A master processor controls the system; the other processor look to the master for instructions or predefined tasks. It defines a master-slave relationship. Example Sun OS version 4.
Asymmetric multiprocessor was the only one type of multiprocessor available before symmetric multiprocessor were created. Now also, this has cheaper option.

Multiprocessing however means using more than one processor. However, multiprocessor or parallel system are increasing in importance nowadays. These systems have multiple processors working the parallel that share the computer clock, memory bus, peripheral devices etc. The following figure demonstrate the multiprocessor architecture as

Types of Multiprocessors
There are mainly two types of multiprocessor i.e symmetric and asymmetric multiprocessors.1. Symmetric Multiprocessor
In this type of multiprocessor each runs an identical copy of the OS and these copies communicate with one another as needed. All Processor are peers. Examples are Windows NT, Sun Solaries, Digital Unix, OS/2 and Linux.
2. Asymmetric multiprocessor
In this multiprocessor each processor is assigned a specific task. A master processor controls the system; the other processor look to the master for instructions or predefined tasks. It defines a master-slave relationship. Example Sun OS version 4.
Asymmetric multiprocessor was the only one type of multiprocessor available before symmetric multiprocessor were created. Now also, this has cheaper option.
Advantages of multiprocessor systems
- More reliable system (Ability to continue working if any CPU fails)
- Enhanced Throughput
- More Economic systems
- Increased Expense
- Complicated Operating system required
- Large main memory required
Flynn's Classification
- In 1966, Flynn's proposed or classified the computer architecture into 4 types. So this concept known as Flynn's classification.
- This classification has been used as a tool in the design of modern processors and their functionalities.
- Due to Flynn's classification the multiprocessing and multiprocessing concept has evolved.
- Flynn's classified the system into four types that is based upon the number of current instruction streams and data streams available in the architecture .
Flynn's Classifications

Single Instruction Single Data (SISD) System
- It is Uni-processor machine
- It executes a single instruction which operate on a single data stream.
- In SISD, machine instructions are processed in a sequential manner, So it is known as sequential computers.
- It this the speed of the processing element in the SISD model is limited or dependent on the rate at which the information is transformed.
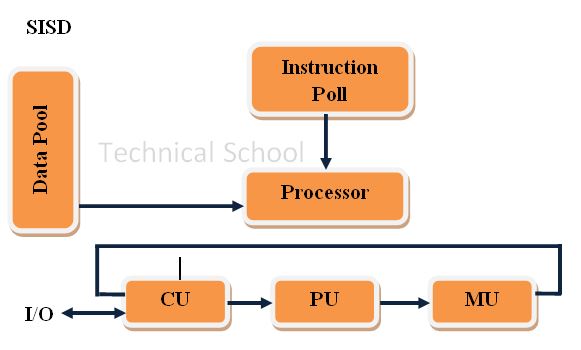 |
| SISD Uni-Processor Architecture |
Captions
CU - Control Unit PU - Processing Unit
MU - Memory Unit IS - Instruction Stream
DS - Data Stream
Single Instruction Multiple Data (SIMD) Systems
- SIMD is multiprocessor system.
- It execute the instruction on all the CPU's but operate on different data streams.
- SIMD model is well suited to scientific operations. So that the information can be passed to all the processing elements organized data elements of vectors can be divided into multiple sets (N sets for N PE system) and each PE can process on data set.
- SIMD system is cray's vector processing machine.
 |
| SIMD Architecture (With Distributed Memory) |
Captions :
CU - Control Unit PU - Processing Unit
MU - Memory Unit IS - Instruction Stream
DS - Date Stream PE - Processing Element
LM - Local Memory
Multiple Instruction Single Data (MISD) Systems
- It is a multiprocessor machine
- It execute different instructions on different PE (Processing Element) but all of the operates on the same data set.
- It performs different operations on the same data set.
- The computer system built using the MISD model are not useful in most of the applications.
 |
| MISD Architecture (The systolic Array) |
Captions
CU - Control Unit, PU- Processing Unit, MU- Memory Unit,
IS - Instruction Stream, DS-Data Stream, PE - Processing Element
LM - Local Memory
Multiple Instruction Multiple Data (MIMD) Systems)
- This system is multiprocessor machine
- It executes multiple instructions on multiple data sets.
- In this, each processing elements (PE) has separate instruction and data streams
- The computer system built using the MIMD model are capable for all types of applications
- In this processing elements (PE) work asynchronously while SIMD and MISD machine doesn't work asynchronously
 |
| MIMD Architecture (With shared Memory) |
Captions:
CU - Control Unit PU - Processing Unit
MU - Memory Unit IS - Instruction Stream
DS - Data Stream PE - Processing Element
LM - Local Memory
FCFS Job Scheduling Algorithm in OS (Operating System)
Rajkumar Lama
August 21, 2019
FCFS Job Scheduling Algorithm
,
Operating System
,
OS
,
OS Numeric
,
Scheduling algorithm
A process scheduler schedules different process to be assigned to the CPU based on particular scheduling algorithms. In this section we will discuss about FCFS (First come First Server) Scheduling algorithm.
First Come First Serve (FCFS)
In this algorithm jobs are executed on first come, first serve basis. It is a non preemptive, preemptive scheduling algorithm. This algorithm is easy to understand and implement. Its implementation is based on FIFO queue. It is poor in performance as average wait time is high.
Example :
Consider following process and calculate average turnover FCFS algorithm.
 = Solution
= Solution
Gaint Chart
 Average Waiting Time = Finished time - Arrival time - Brush time
Average Waiting Time = Finished time - Arrival time - Brush time
= (0+25+32)/3
= 19
Average Turnaround Time = Finished time - Arrival time
= (27+34+34)/3
= 31.67
First Come First Serve (FCFS)
In this algorithm jobs are executed on first come, first serve basis. It is a non preemptive, preemptive scheduling algorithm. This algorithm is easy to understand and implement. Its implementation is based on FIFO queue. It is poor in performance as average wait time is high.
Consider following process and calculate average turnover FCFS algorithm.

Gaint Chart

= (0+25+32)/3
= 19
Average Turnaround Time = Finished time - Arrival time
= (27+34+34)/3
= 31.67
Device Driver (Operating System)
Rajkumar Lama
August 21, 2019
Device Driver
,
Device driver in computer
,
device driver in os
,
Operating System
,
OS
Device driver is the software that is responsible for communicating with device controller and reset of the operating system. Device drivers are vendor specific software and are provided by I/O device manufactures. It place vital role in making operating systems independent of I/O devices. Device manufactures are responsible for providing different drivers for different operating systems. This means separate device driver is needed for Windows, Linux, Sun Solaries, Unix etc.


Fragmentation (Operating System)
Rajkumar Lama
August 21, 2019
fragmentation in computer
,
fragmentation in harddisk
,
fragmentation in os
,
fragmented memory
,
memory fragmentation
,
Operating System
,
OS
,
types of fragmentation
,
What is Fragmentation?
Fragmentation refers to the condition of disk in which files are divided into pieces scattered around the disk. Fragmentation occurs naturally when we use a disk frequently, creating, deleting and modifying files.
There are two types of fragmentation

1. Internal Fragmentation
2. External Fragmentation
There are two types of fragmentation

- It occurs with all memory allocation strategies. This is caused by the fact that memory is allocated in blocks of a fixed size, wheres the actual memory needed will rarely be that exact size. For a random distribution of memory requests, on the average 1/2 block will be wasted per memory request, because on the average the last allocated block will be only half null.
- Note that the same effect happens with hard drives, and that modern hardware gives us increasingly larger drives and memory at the expense of ever larger block size, which translate to more memory lost to internal fragmentation.
- Some system use variable size blocks to minimize losses due to internal fragmentation.
2. External Fragmentation
- External fragmentation means that the available memory is broken up into lots of little pieces, none of which is big enough to satisfy the next memory requirement, although the same total could.
- All the memory allocation strategies suffer from external fragmentation, though first and best fits experience the problems more so than worst fit. The amount of memory lost to fragmentation may very with algorithm, usage patterns, and some design decision such as which end of a hole to allocate and which end to save on the free list.
- Statistical analysis of first fit, for example, shows that for N blocks of allocated memory, another 0.5 N will be lost to fragmentation.
- If the program in memory are relocatable, then the external fragmentation problem can be reduced via compaction, i.e. moving all processes down to one end of physical memory. This only involves updating the relocation register for each process, as all internal work is done using logical addresses.
Virtual Memory in Computer
Rajkumar Lama
August 21, 2019
Operating System
,
OS
,
Virtual Memory
,
Virtual memory in OS
,
what is virtual memory in computer
,
What is virtual memory?
 |
| virtual memory is a section of a hard disk that's set up to emulate the computer's RAM. |
Virtual Memory is a storage allocation scheme in which secondary memory can be addressed as thought it were part of main memory. Virtual memory is a memory management technique that is implemented using both hardware and software. It maps memory addresses used by a program, called virtual address, into physical addresses in computer memory. It gives an illusion to the programmer that programs which are larger in size than actual memory can be executed. Virtual memory can be implemented with demand paging.
The main visible advantage of this scheme is that programs can be larger than physical memory. Virtual memory serves two purposes. First, it allows us to extend the use of physical memory by using disk. Second, it allows us to have memory protection, because each virtual address is translated to a physical address.
Modern microprocessors intended for general-purpose unit, or MMU, is built into the hardware. The MMU's job is to translate virtual addresses into physical addresses.
Virtual memory also allows the sharing of files and memory by multiple processes with several benefits:
- System libraries can be shared by mapping them into the virtual address space of more than one process.
- Processes can also share virtual memory by mapping the same block of memory to more than one process.
- Process pages can be shared during fork() system call, eliminating the need to copy all of the page of the original (parent) process.
Semaphore Concept (Operating System)
Rajkumar Lama
August 21, 2019
1
mutex in os
,
Operating System
,
OS
,
semaphore and mutex
,
Semaphore concept in os
,
Semaphore in os
,
semaphore in os notes
,
semaphore meaning

Concept of semaphore was devised by Dijkastra in 1965. Semaphore is an integer variable that is used to record number of weakups and had been saved. If it is equal to zero it indicates that no wakeup's are saved. A positive value shows that one or more wakeup's are pending. The DOWN operation (sleep) checks the semaphore to see if it is greater than zero. If it is, it decrements the value (UP) and continues. If the semaphore is zero the process sleeps. The UP operation (weakup) increments the value of the semaphore. If one or more proces were sleeping on that semaphore then one of the process is chosen and allowed to compute its DOWN. Checking and updating the semaphore must be done as an atomic action to avoid race conditions. Product Customer problem can be solved using semaphore as below.
#define N 100 /* number of slots in the buffer */ typedef int semaphore; /* semaphores are a special kind of int */ semaphore mutex = 1; /* controls access to critical region */ semaphore empty = N; /* counts empty buffer slots */ semaphore null = 0; /* counts full buffer slots */ void producer(void){ int item; message m; // message buffer. while(TRUE){ item = produce_item(); // generate something to put in buffer receive(consumer, &m); // Receive an empty message, if any build_message(&m, item); // construct a message to send send(consumer, &m); // send item to consumer } } void consumer(void){ int item, i; message m; for(i=0; i<N; i++) send(producer, &m); // send N empty messages while(TRUE){ receive(produce, &m); // get message containing item item = extract_item(&m); // extract item from message send(producer, &m); //send back empty replay consumer_item(term); //do something with the item } }
The Shell (Operating System)
Rajkumar Lama
August 21, 2019
Operating System
,
OS
,
shell in operating system
,
shell in os
,
The Shell in Operating system
 |
| The shell is an interface between user and the operating system |
- The operating system shell is the mechanism that carries out the system calls requested by the various parts of the system.
- Shell is not part of the operating system kernel. The shell is the part of operating systems such as UNIX and MS-DOS where we can type commands to the operating system and receive a response.
- Shell is also called the Command Line Interpreter (CLI) or the “C” prompt. Shell is the primary interface between a user sitting at his terminal and the operating system. Many shells exist, including sh, csh, ksh, and bash.
- It starts out by typing the prompt, which tells the user that the shell is waiting to accept a command. If the user now types “date” command, the shell creates a child process and runs the date program as the child.
- While the child process is running, the shell waits for it to terminate. When the child finishes, the shell types the prompt again and tries to read the next input line.
- A more complicated command is:
- This command concatenates three files and pipes them to the sort program. It then redirects the sorted file to a line printer. The ampersand “&” at the end of the command instructs UNIX to issue the command as a background job. This results in the command prompt being returned immediately, whilst another process carries out the requested work.
- Above command makes a series of system calls to the operating system in order to satisfy the whole request.
Types of Operating System
Rajkumar Lama
August 21, 2019
mict 1st semester operating system notes
,
Operating System
,
Operating system notes
,
OS
,
types of operating system

Mainframe Operating Systems:
- A mainframe with 1000 disks and thousands of gigabytes of data is not unusual. Mainframes are normally used as web servers, servers for large-scale electronic commerce sites etc.
- The operating systems for mainframes typically offer three kinds of services: batch, transaction processing, and time sharing.
- A batch system is one that processes routine jobs without any interactive user present. For example, claim processing in an insurance company
- Transaction processing systems handle large numbers of small requests per second; for example, check processing at a bank or airline reservations.
- Timesharing systems allow multiple remote users to run jobs on the computer at once, such as querying a big database.
- These functions are closely related: mainframe operating systems often perform all of them. An example mainframe operating system is OS/390, a descendant of OS/360
Personal Computer Operating Systems:
- Job of personal computer operating system is to provide a good interface to a single user. They are widely used for word processing, spreadsheets, Internet access etc.
- Personal computer operating systems are so widely known to the people who use computers but only few computer users knows about other types of operating systems.
- Common examples of PC operating systems are Windows 2008, Windows 2007, the Macintosh operating system, Linux, Ubuntu etc.
Server Operating Systems:
- Server operating systems run on servers, which are very large personal computers, workstations, or even mainframes.
- They serve multiple users at once over a network and allow the users to share hardware and software resources. Servers can provide print service, file service, or Web service.
- Internet providers run many server machines to support their customers and Web sites use servers to store the Web pages and handle the incoming requests. Some Examples of typical server operating systems are UNIX and Windows 2007 server, Sun Solaris etc.
Real-Time Operating Systems:
- Another type of operating system is the real-time system. These systems are characterized by having time as a key parameter.
- Deadline slip may cause huge disaster sometimes. Two Types: hard real-time system, soft real-time
- If the action absolutely must occur at a certain moment (or within a certain range), we have a hard real-time system. For example, if a car is moving down an assembly line, certain actions must take place at certain instants of time, if a welding robot welds too early or too late, the car will be ruined
- Another kind of real-time system is a soft real-time system, in which missing an occasional deadline is acceptable. Digital audio or multimedia systems fall in this category.
Time Sharing Systems:
- Time sharing is a technique which enables many people, located at various terminals, to use a particular computer system at the same time.
- Time-sharing or multitasking is a logical extension of multiprogramming. Processor's time which is shared among multiple users simultaneously is termed as time-sharing. In Time-Sharing Systems objective is to minimize response time.
- Multiple jobs are executed by the CPU by switching between them, but the switches occur so frequently. Thus, the user can receives an immediate response.
History of Operating System
Rajkumar Lama
August 21, 2019
Generations of operations
,
Generations of OS
,
Operating System
,
Operating system notes
,
OS
In this section we take a brief look at the history of operating system which is almost the same as looking at the history of computers.

First Generation (1945-1955)

First Generation (1945-1955)
- During second second world war many people were developing automatic calculating machines. These first generation computers filled entire rooms with thousands of vacuum tubes.
- They did not have an operating system, they did not even have programming languages and programmers had to physically wire the computer to carry out their intended instructions. The programmers also had to book time on the computer as a programmer had to have dedicated use of the machine.
Second Generation (1955-1965)
- Vacuum Tubes provide very unreliable and a programmer, wishing to run his program, could quite easily spend all his/her time searching for an replacing tubes that had blown.
- Development of Transistor : Now, instead of programmers booking time on the machine, the computers were under submitted on punched cards that were placed onto a magnetic tape. This tape was given to the operators who ran the job through the computer and delivered the output to the expectant programmer.
- Concept of batch-processing (jobs): Instead of submitting one job at a time, many jobs were placed onto a single tape and these were processed one after another by the computer. The ability to do this can be seen as the first real operating system.
Third Generation (1965-1980)
- IC (Integrated circuit) as a replacement for transistors : The third generation saw the start of multi programming. This is the computer could give the illusion of running more than one task at a time.
- When one job had to wait for I/O request, another program could use the CPU. The concept of multi-programming led to a need for a more complex operating system.
- Another feature of third generation machine was that they implemented spooling. This allowed reading of punch cards onto disc as soon as they were brought into the computer room. This eliminated the need to store the jobs stored to disc, thus allowing programs that produced output to tun at the speed of the disc, and not the printer.
- Up until these point programmers were used to giving their job to an operator and watching it run.
- This concept led to the concept of time sharing. This allowed programmers to access the computer from a terminal and work in an interactive manner.
- Obviously, with the advent of multi programming, spooling and time sharing, operating system had to become a lot more complex in order to deal with all these issues.
Fourth Generation (1980-present):
- The late seventies saw the development of Large Scale Integration (LSI). This led directly to the development of the personal computer (PC).
- These computers were (originally) designed to be single user, highly interactive and provide graphics capability. One of the requirements for the original PC produced by IBM was an operating system and, Bill Gates supplied MS-DOS on which he made his fortune.
- In addition, mainly on non-Intel processors, the UNIX operating system was being used.
- Mainly, we can say that Graphical User Interface (GUI) became popular in 4th generation computers.
Fifth Generation (Sometime in the future):
- We can notice that each generation have been influenced by new hardware. The fifth generation of computers may be the first that breaks with this tradition and the advances in software will be as important as advances in hardware.
- Able to interact with humans in a way that is natural to us. No longer will we use mice and keyboards but we will be able to talk to computers in the same way that we communicate with each other.
- In addition, we will be able to talk in any language and the computer will have the ability to convert to any other language. Computers will also be able to reason in a way that imitates humans. Advances need to be made in AI (Artificial Intelligence).
- It is also likely that computers will need to be more powerful. Maybe parallel processing will be required. Maybe a computer based on a non-silicon substance may be needed to fulfill that requirement (as silicon has a theoretical limit as to how fast it can go).
What is Segmentation? (Operating System)
Rajkumar Lama
August 21, 2019
Operating System
,
OS
,
segmentation in operating system
,
segmentation in os
,
What is segmentation
- Paged virtual memory is one-dimensional in which virtual addresses goes from 0 to some maximum address
- A segment is a logical entity. It might contain a procedure, or an array, or a stack, or a collection of scalar variables, but usually it doesn’t contain a mixture of different types.
- Segmentation is the mechanism that provides the machine with multiple completely independent address spaces. Thus segmentation provides two-dimensional address space. Each segment consists of linear sequence of addresses, from 0 to some maximum
- To specify an address in this segmented or 2-dimensional memory, the program must supply a 2-part virtual address: 1) segment number(s) and 2) an address within the segment called offset (s).
- Virtual address to physical address translation process is shown in figure below:

Deadlock Detection and Recovery (Operating System)
Rajkumar Lama
August 21, 2019
Deadlock detection algorithm
,
Deadlock Detection and Recovery
,
Deadlock detection method
,
Deadlock Recovery
,
Operating System
,
OS
- If a system does not employ either a deadlock-prevention or a deadlock-avoidance algorithm, then a deadlock situation may occur. In this environment, the system must provide:
- An algorithm that examines the state of the system to determine whether a deadlock has occurred.
- An algorithm to recover from the deadlock.

Algorithm for detecting deadlock:
- For each node, N in the graph, perform the following five steps with N as the starting node.
- Initialize L to the empty list, designate all arcs as unmarked.
- Add current node to end of L, check to see if node now appears in L two times. If it does, graph contains a cycle (listed in L), algorithm terminates.
- From given node, see if any unmarked outgoing arcs. If so, go to step 5; if not, go to step 6.
- Pick an unmarked outgoing arc at random and mark it. Then follow it to the new current node and go to step 3.
- If this is initial node, graph does not contain any cycles, algorithm terminates. Otherwise, dead end. Remove it, go back to previous node, make that one current node, go to step 3.
Recovery From Deadlock
When a detection algorithm determines that a deadlock exists, there are two options for breaking a deadlock. One solution is simply to abort one or more processes to break the circular wait. The second option is to preempt some resources from one or more of the deadlocked processes.
Process Termination: To eliminate deadlocks by aborting a process, we use one of two methods. In both methods, the system reclaims all resources allocated to the terminated processes.
- Abort all deadlocked processes
- Abort one process at a time until the deadlock cycle is eliminated –overhead, a deadlock-detection after terminating a process
Resource Preemption: To eliminate deadlocks using resource preemption, we successively preempt some resources from processes and give these resources to other processes until the deadlock cycle is broken. Some issues need to be addressed are:
- Selecting a victim: Some process will have to rolled back to break deadlock. Select that process as victim that will incur minimum cost.
- Rollback: Determine how far to roll back the process
Total rollback: Abort the process and then restart it. More effective is to roll back the process only as far as necessary to break deadlock
Starvation: Starvation happens if same process is always chosen as victim. To avoid this, we include the number of rollbacks in the cost factor.
Critical Section (Operating System)
Rajkumar Lama
August 21, 2019
Critical Section
,
Critical section in OS
,
MICT 1st semester notes
,
Operating System
,
OS
,
OS Notes
- One way to avoid race conditions is not to allow two processes to be in their critical sections at the same time.
- Critical section is the part of the process that accesses a shared variable.
- That is, we need a mechanism of mutual exclusion. Mutual exclusion is the way of ensuring that one process, while using the shared variable, does not allow another process to access that variable.

Race Condition (Operating System)
- Race conditions are situations where two or more processes reads or writes some shared data at the same time and the final result is incorrect.
- Final result may be different according to order of completion of competing processes.
- let us consider a simple but common example: a print spooler. When a process wants to print a file, it enters the file name in a special spooler directory.
- Another process periodically checks to see if there are any files to be printed, and if there are, it prints them and then removes their names from the directory.
- Consider the situation given in figure below, where in and out are two shared variables.

- Process A reads value of in(i.e. 7) but before inserting the name of the document to be printed in index 7, the CPU decides to schedule process B.
- Now, process B also reads in, and also gets 7. Process B now continues to run and stores the name of its file in slot 7 and updates in to be an 8.
- After some time process A runs again. It looks at value of in stored in its local variable and finds a 7 there, and writes its file name in slot 7.Then it increments value of in and sets in to 8.The printer daemon will not notice anything wrong, but process B will never receive any output. Situations like this are called race conditions.
System Calls (Operating System)
Rajkumar Lama
August 21, 2019
1
Define system cell
,
Operating System
,
Operating system notes
,
OS
,
OS Notes
,
System Cell
,
What is System Cell
- System calls are the interface between the operating system and the user programs. Access to the operating system is done through system calls.
- Each system call has a procedure associated with it so that calls to the operating system can be done in a similar way as that of normal procedure call.
- When we call one of these procedures it places the parameters into registers and informs the operating system that there is some work to be done. When a system call is made TRAP instruction is executed. This instruction switches the CPU from user mode to kernel (or supervisor) mode.
- Eventually, the operating system will have completed the work and will return a result.
- Making a system call is like making a special kind of procedure call, only system calls enter the kernel and procedure calls do not.
- Example: count = read(file, buffer, nbytes);

To make this concept clearer, let us examine the read call written above. Calling program first pushes the parameters onto stack (steps 1-3) before calling the read library procedure (step 4), which actually makes the read system call.
- The library procedure, possibly written in assembly language, typically puts the system call number in specified register (step 5). Then it executes a TRAP instruction to switch from user mode to kernel mode and start execution at a fixed address within the kernel (step 6).
- The kernel code examines the system call number and then dispatches to the correct system call handler (step 7). At that point the system call handler runs (step 8).
- Once the system call handler has completed its work, control may be returned to the user-space library procedure at the instruction following the TRAP instruction (step 9).
- This procedure then returns to the user program in the usual way procedure calls return (step 10).
- To finish the job, the user program has to clean up the stack, as it does after any procedure call (step 11).
Process and Thread its Difference in CPU (Operating System)
Rajkumar Lama
August 21, 2019
MICT 1st semester notes
,
Operating System
,
OS
,
OS Notes
,
What is process?
,
What is Thread?
Process
Process is a program that is ready for execution in CPU. When a program is loaded into memory, it becomes ready for execution and competes with other process to access CPU. Thus when a program is loaded into memory it becomes process. Computers nowadays can do many things at the same time. They can be writing to a printer, reading from a disc and scanning an image. Operating system is responsible for running many processes, usually, on the same CPU. In fact, only one process can be run at a time so the operating system has to share the CPU between the processes that are available to be run, while giving the illusion that the computer is doing many things at the same time. This approach can be directly contrasted with the first computers. They could only run one program at a time.

Now, the main point of this part is to consider how an operating system deals with processes when we allow many to run. To achieve true parallelism we must have multiprocessor system when n processors can execute n programs simultaneously. True parallelism cannot be achieved with singl CPU. In single processor CPU switched from one process to another process rapidly. In 1 sec CPU can serve 100's of processes giving the illusion of parallelism to a user which is called pseudo-parallelism.
Threads
Threads are like mini-processes that operate within a single process. Each thread has its own program counter and stack so that it knows where it is. Apart from this they can be considered the same as process, with the exception that they share the same address space. This means that all threads from the same process have access to the same global variable and the same files. Threads are also called light weight process. The table given below shows the various items that a process has compared to the items that each thread has.
Uses of Thread
- Some application need to perform multiple activities at once that share common data and files. Thus reason behind need of multiple threads.
- Ability of parallel entities, within a process to all share common variables and data.
- Since threads do not have their own address space, it is easier to create and destroy threads than processes. In fact thread creation is around 100 times faster than process creation.
- Thread switching has much less overhead than process switching because threads have few information attached with them.
- Performance gain when there is a lot of computing and lot of I/O as tasks can overlap. Pure CPU bound thread application no advantage through
- Threads are very effective on multiple CPU system for concurrent processing because with multiple CPU's true parallelism can be achieved
| Thread | Process |
|---|---|
| - Threads are lightweight | - Processes are heavyweight |
| - Threads are runs in address space of processes | - Processes have their own address space |
| - Threads shares files and other data | - Processes do not share files and other data |
| - Thread switching is faster | - Process switching is slower |
| Threads are easy to create and destroy | Process are difficult to create and destroy |
MKRdezign
Powered by Blogger.